 Cookie preferences
Cookie preferences
Active filters
LATEST NEWS






WiMo multiparameter sonde

The WiMo sonde can measure up to 20 water parameters as you can plug up to seven sensors at a time.


WiMo BUOY
The WiMo sonde can measure up to 20 water parameters as you can plug up to seven sensors at a time in a small float or buoy.
PRS275 PINGER RECEIVER SYSTEM

The PRS-275 is a diver pinger receiver that can be converted to surface pinger receiver using a separate directional hydrophone and user adjustable staff assembly. The system includes the DPR-275 diver pinger receiver, waterproof headset, adjustable staff assembly with directional hydrophone, cable assembly, and shipping container.


ULB-350 LOW COST LOCATION BEACON
This underwater beacon is a cost effective free-running pinger used for marking equipment and underwater sites to depths of 1,200m. Using a single 9-volt battery, the ULB-350 can send a continuous acoustic signal for up to 60 days or on a programmed time delay for up to three months.
ATT-400 ACOUSTIC TARGET TRANSPONDER
The ATT-400 transponder can operate underwater as a pinger or transponder. This underwater acoustic transponder is small and easy to deploy in depths of 1000m. When interrogated by the STI-350, DTI-300 or VADR series acoustic receivers, the ATT-400 provides range and bearing up to 750 meters away. The ATT-400 can also be programmed to operate as a free-running pinger. With a battery life of up to six months, this transponder is ideal for marking equipment and locations in poor visibility.


DPR-275 DIVER PINGER RECEIVER
This small and rugged handheld diver acoustic receiver with LCD display and signal strength meter can track and locate any acoustic pinger that operates between 5 to 80 kHz.


PROFILING FLOATS ARVOR - PROVOR
NKE Instrumentation is involved in the international ARGO program in order to supply profiling floats measuring temperature and salinity.







DRIFTER SC-40
The SC40 drifters are used mostly in offshore in order to monitor the current at sea surface for oceanographic studies and also the oil spill trajectories.
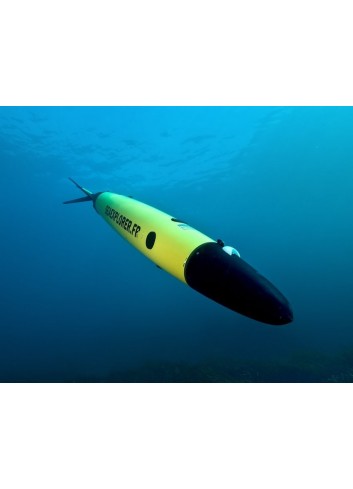

SEAEXPLORER

The SEAEXPLORER moves through water by varying its buoyancy, allowing it to achieve long-term performance and stealth performance. He regularly returns to the surface to transmit information to the operator, in particular his position, the mission in progress, etc.
