Cookie preferences
Cookie preferences




COMET-300 AUV

COMET-300 is a state-of-the-art AUV featuring advanced navigation and detection capabilities.
LATEST NEWS
COMET-300 is a state-of-the-art AUV featuring advanced navigation and detection capabilities.

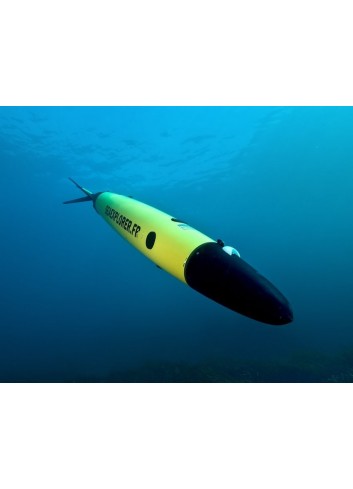
The SEAEXPLORER moves through water by varying its buoyancy, allowing it to achieve long-term performance and stealth performance. He regularly returns to the surface to transmit information to the operator, in particular his position, the mission in progress, etc.

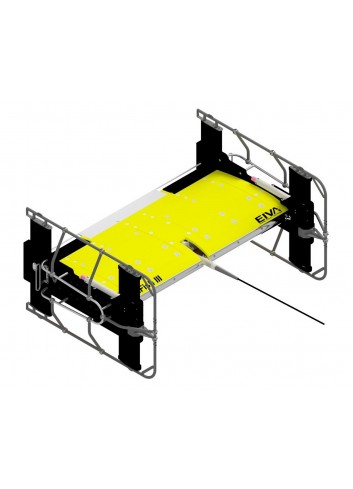
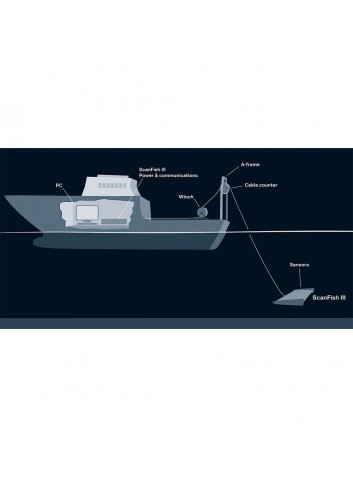
The HAMMERHEAD is a vehicle platform featuring extremely light corrugated instrumentation and designed to be towed with a wide variety of data collection instruments. This is the improved evolution of the ROTV MiniBat FC60.

A9-E is the configuration of the autonomous autonomous vehicle A9 of the ECA group, AUV, for environmental monitoring. In addition to acquiring images of the seabed, it will record bathymetric data as well as environmental information such as water turbidity, conductivity, temperature, fluorescence, dissolved oxygen or pH. Mission planning and tracking is done through user-friendly software that lets you track the vehicle at all times during your mission.

Ocean research, exploration and adventures are easily accessible with our flagship product, the BlueROV2.

The Dusky Shark T2 Subsea Line Laser is used when measurements are needed from video images.
A18-D is the mid-size autonomous underwater vehicle of the ECA, AUV group for deep water applications. It is dedicated to the precise exploration of the seabed in 3D. It performs autonomous missions from a depth of 3000 m for up to 21 hours and is easy to transport by plane for missions abroad. This system can be delivered with an LARS which enables automatic underwater recovery and Triton Imaging software applications for further data processing.
A18-S is the 3D image sonar configuration of the A18 autonomous underwater vehicle of the ECA Group. This AUV is designed to develop precision 3D inspections of the seabed. It is deployed from a surface vessel and an LARS allowing automatic recovery can be used. The vehicle operates autonomously at depths of 300 meters with 21 hours of battery life and is easy to transport by plane.

FIFISH V6 EXPERT is a professional-class underwater robot and multi-capable tool for enhancing your underwater missions and operations. The V6 EXPERT can be equipped with an onshore power supply system that delivers optimal diving performance and operating time.
FIFISH V6 EXPERT is a professional-class underwater robot and multi-capable tool for enhancing your underwater missions and operations. The V6 EXPERT can be equipped with an onshore power supply system that delivers optimal diving performance and operating time.

Ocean research, exploration and adventures are easily accessible with our flagship product, the BlueROV2.
The BlueBoat is the most affordable robotic surface vessel on the planet. With an innovative hull design, endless expansion possibilities and open source BlueOS software, it is the ideal platform for hydrographic surveys and robotic system development.