 Cookie preferences
Cookie preferences
LATEST NEWS





Spectrophotometer UV Visible Reference Beam 4...

Spectrophotometer UV Visible Reference Beam 4 nm UVILINE 9600/9300

Analyzer for COD BOD TOC TSS NO3 without...
Analyzer for COD BOD TOC TSS NO3 without reagent PASTEL UV

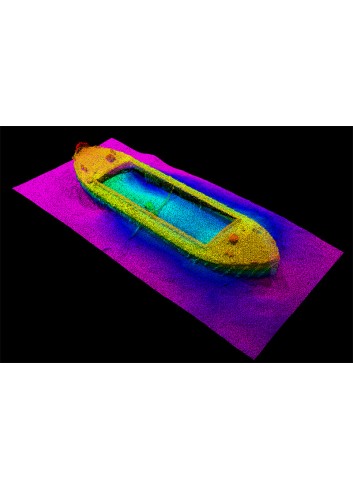



COMET-300 AUV

COMET-300 is a state-of-the-art AUV featuring advanced navigation and detection capabilities.


ACOUSTIC RECORDER SYLENCE-LP
SYLENCE-LP underwater acoustic recorders allow cost-effective and reliable acoustic monitoring with best value for money on the market




WiMo multiparameter sonde

The WiMo sonde can measure up to 20 water parameters as you can plug up to seven sensors at a time.






Spectrophotometer Visible Single Beam 10 nm...
Spectrophotometer Visible Single Beam 10 nm PRIM Advanced








UNDERWATER GPS G2

Underwater GPS G2. Worlds most robust positioning system! 100 or 300 meter range. Quick deploy antenna.


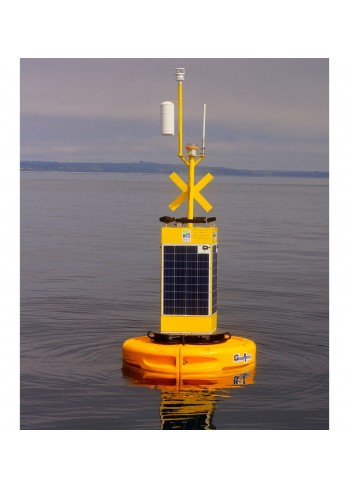
WiMo BUOY
The WiMo sonde can measure up to 20 water parameters as you can plug up to seven sensors at a time in a small float or buoy.


PRS275 PINGER RECEIVER SYSTEM

The PRS-275 is a diver pinger receiver that can be converted to surface pinger receiver using a separate directional hydrophone and user adjustable staff assembly. The system includes the DPR-275 diver pinger receiver, waterproof headset, adjustable staff assembly with directional hydrophone, cable assembly, and shipping container.







USBL EASYTRAK

Easytrak is a compact Ultra Short Baseline (USBL) system designed for the efficient tracking of underwater targets such as divers, ROVs, AUVs and tow fish.

